2.4 KiB
2.4 KiB
全向轮整车动力学建模
本模型假设各轮子与地面摩擦力一致且不会打滑,机体一定与地面水平。理论上能够通过力控3508实现对车辆速度控制,一定程度上避免速度环PID控制调参不够完美带来的四轮运动不统一问题。
1.1模型定义
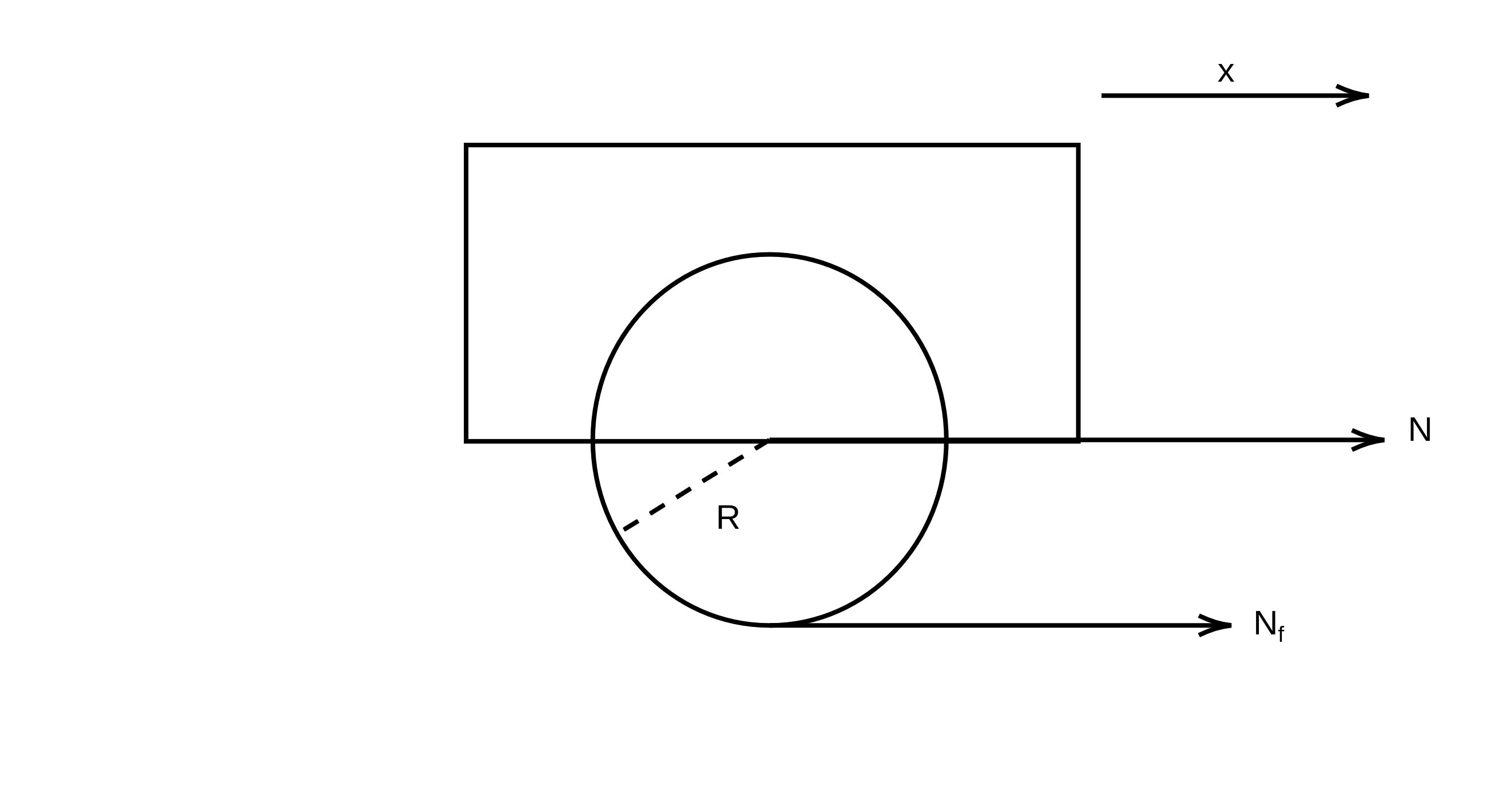
首先仅考虑x方向移动,机器人抽象为方形机体和圆形驱动轮。假设有神秘力量保证机体一定水平。
变量与参数定义如下表所示
| 符号 | 含义 | 正方向 | 单位 |
|---|---|---|---|
x |
机体位移 | 箭头所示 | m |
N |
驱动轮对机体的力 | 箭头所示 | N |
N_f |
地面对驱动轮摩擦力 | 箭头所示 | N |
F_x |
虚拟的驱动轮输出力 | 方向同x |
N |
T |
驱动轮输出力矩 | 方向同x |
N·m |
\omega |
绕质心转动角速度 | 逆时针 | rad/s |
| 符号 | 含义 | 单位 |
|---|---|---|
m |
驱动轮转子质量 | kg |
M |
机体质量 | kg |
I_w |
驱动轮转资转动惯量 | kg·m^2 |
I |
机体绕质心转动惯量 | kg·m^2 |
1.2经典力学分析
首先只考虑x方向移动
对驱动轮:
m\ddot{x}=N_f-N \tag{1}
I\frac{\ddot{x}}{R}=T-N_fR \tag{2}
合并上两式子,消去N_f得:
\ddot{x} = \frac{T-NR}{\frac{I_w}{R}+mR} \tag{3}
对机体:
N=M\ddot{x}\tag{4}
(3),(4)式子可求得:
\ddot{x} = \frac{1}{\frac{I_w}{R}+(m+M)R}T \tag{5}
(5)看作 \ddot{x} 关于 T 的函数两侧积分:
\dot{x} = \frac{1}{2}\frac{1}{\frac{I_w}{R}+(m+M)R}T^2 \tag{6}
设虚拟力:
F_x = \frac{T}{R}\tag{7}
(7)带入(6)得:
\dot{x} = \frac{1}{2}\frac{R^2}{\frac{I_w}{R}+(m+M)R}F_x^2 \tag{6}
得到x方向上速度与驱动轮输出力的关系,同理可得y方向上的表达式,参考全向轮速度分解,到每个轮子电机的输出力上。
旋转:
F_{yaw} = I\frac{\omega}{L}
其中L为轮子转轴中心到车辆转轴中心水平距离。
再将 F_{yaw} 也叠加到各个电机输出上即可。
由于电机输出力矩与电流正相关,即可实现力控。具体结果公式参见手稿。