forked from Hshine/RM_Vison
1.4 KiB
1.4 KiB
ros2_mindvision_camera
ROS2 MindVision 相机包,提供了 MindVision 相机的 ROS API。
Only tested under Ubuntu 22.04 with ROS2 Humble
![]()
使用说明
Build from source
Dependencies
- Robot Operating System 2 (ROS2) (middleware for robotics),
Building
To build from source, clone the latest version from this repository into your colcon workspace and compile the package using
mkdir -p ros_ws/src
cd ros_ws/src
git clone https://github.com/chenjunnn/ros2_mindvision_camera.git
cd ..
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --packages-up-to mindvision_camera
标定
标定教程可参考 https://navigation.ros.org/tutorials/docs/camera_calibration.html
参数意义请参考 http://wiki.ros.org/camera_calibration
标定后的相机参数会被存放在 /tmp/calibrationdata.tar.gz
启动相机节点
ros2 launch mindvision_camera mv_launch.py
支持的参数:
- params_file: 相机参数文件的路径
- camera_info_url: 相机内参文件的路径
- use_sensor_data_qos: 相机 Publisher 是否使用 SensorDataQoS (default:
false)
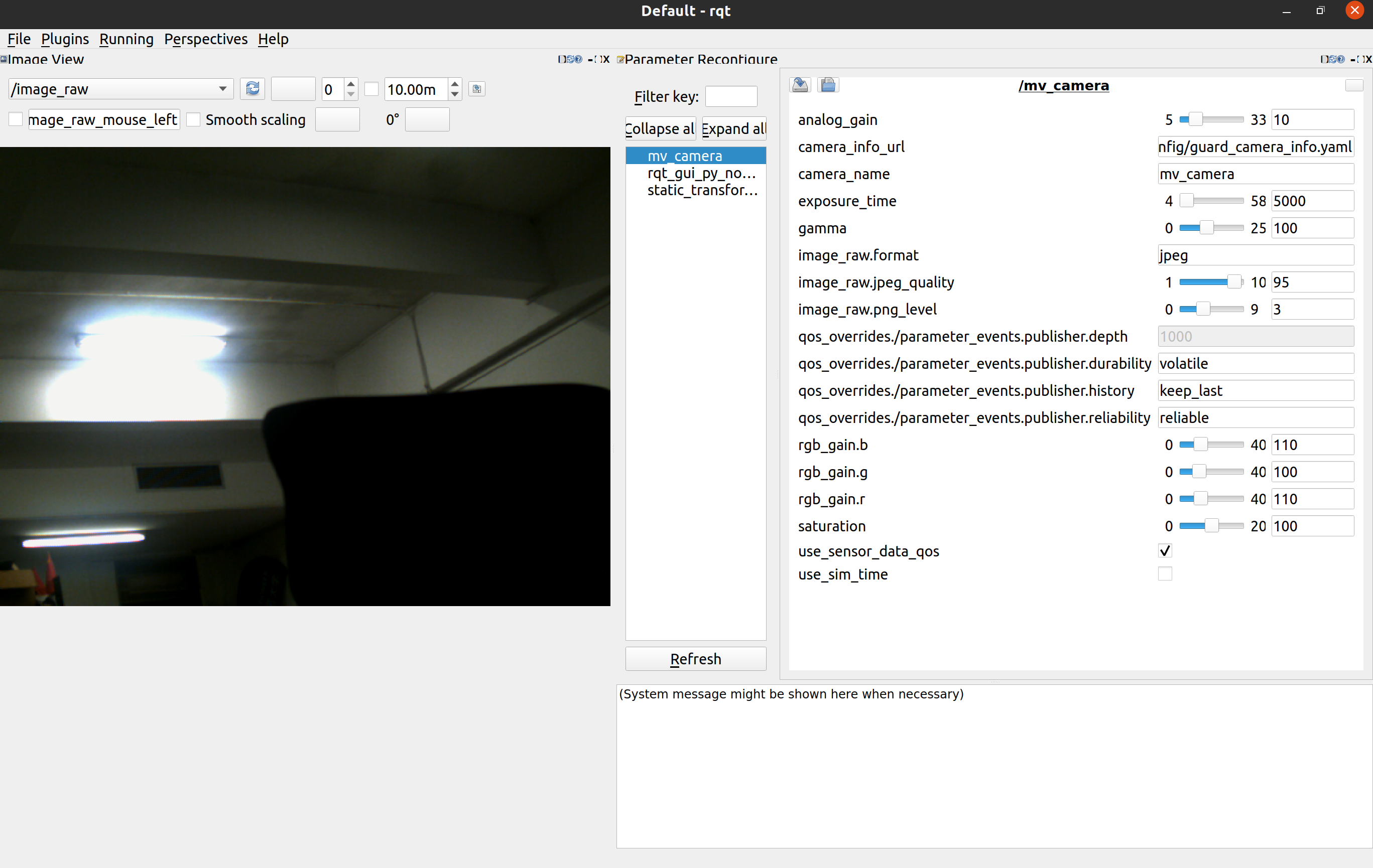
通过 rqt 动态调节相机参数
打开 rqt,在 Plugins 中添加 Configuration -> Dynamic Reconfigure 及 Visualization -> Image View