1.2 KiB
1.2 KiB
24赛季工程机器人代码笔记
24赛季工程机器人代码为basic_framework框架下,C/C++混编,主要目的为使用上海交通大学开源的嵌入式机器人学运算库 SJTU-RoboMaster-Team/Matrix_and_Robotics_on_STM32
混合编译注意事项
机械臂解算相关代码放在了gimbal.cpp中,代码中使用了C++特性的源文件都需要以.cpp结尾
如果希望.c文件能够调用.cpp文件提供的函数,则需要在.cpp文件对应的头文件中加入extern "C" {}关键字
如gimbal.h
#ifndef GIMBAL_H
#define GIMBAL_H
#ifdef __cplusplus
extern "C" {
#endif
/**
* @brief 初始化云台,会被RobotInit()调用
*
*/
void GimbalInit();
/**
* @brief 云台任务
*
*/
void GimbalTask();
#ifdef __cplusplus
}
#endif
#endif // GIMBAL_H
达妙电机相关
湖大开源basic_framework框架的达妙驱动为每个达妙电机单独创建了一个任务,但赛场测试发现这会经常导致某些电机离线,因此新版代码中将所有达妙电机像DJI电机一样在一个任务中控制
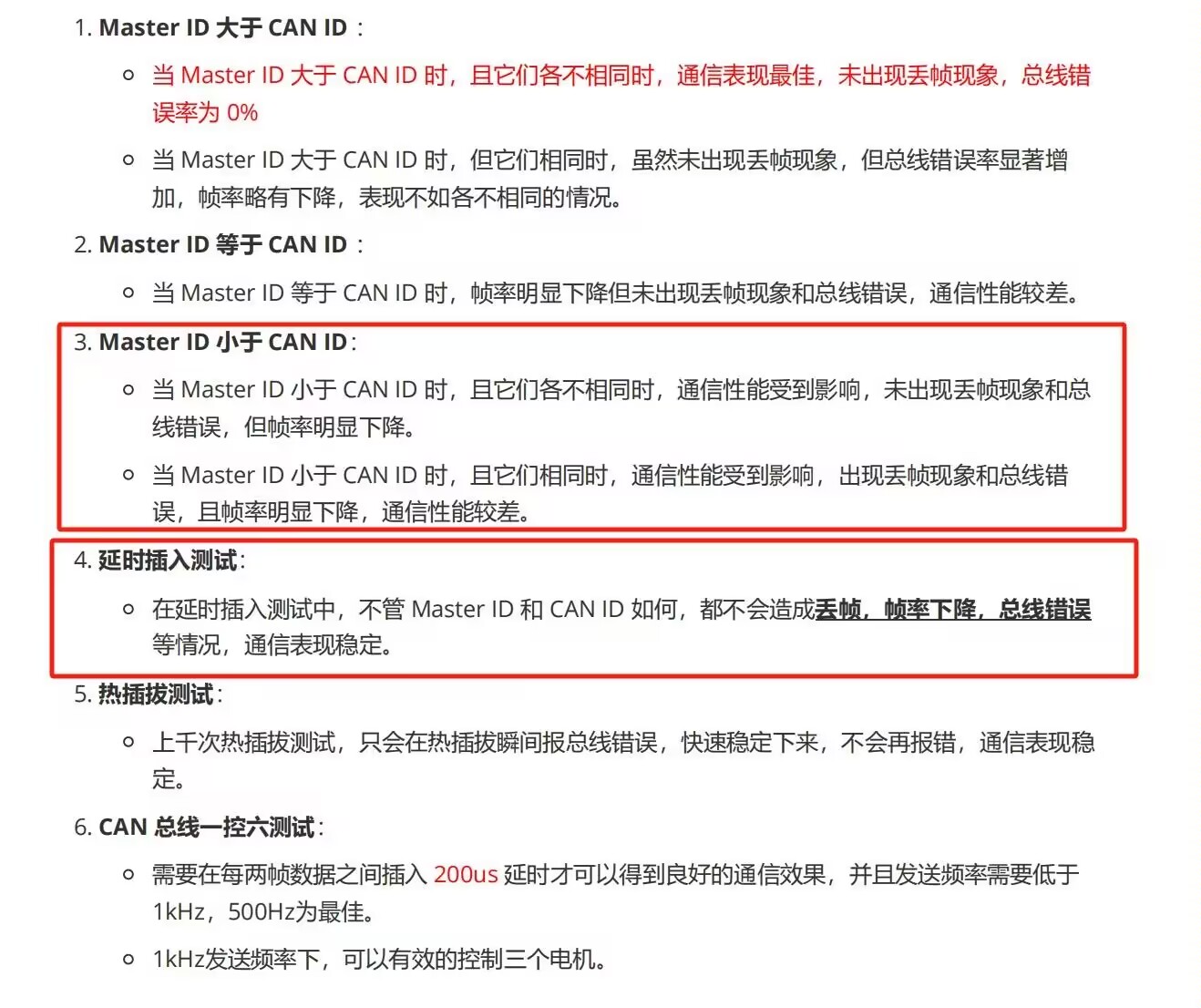
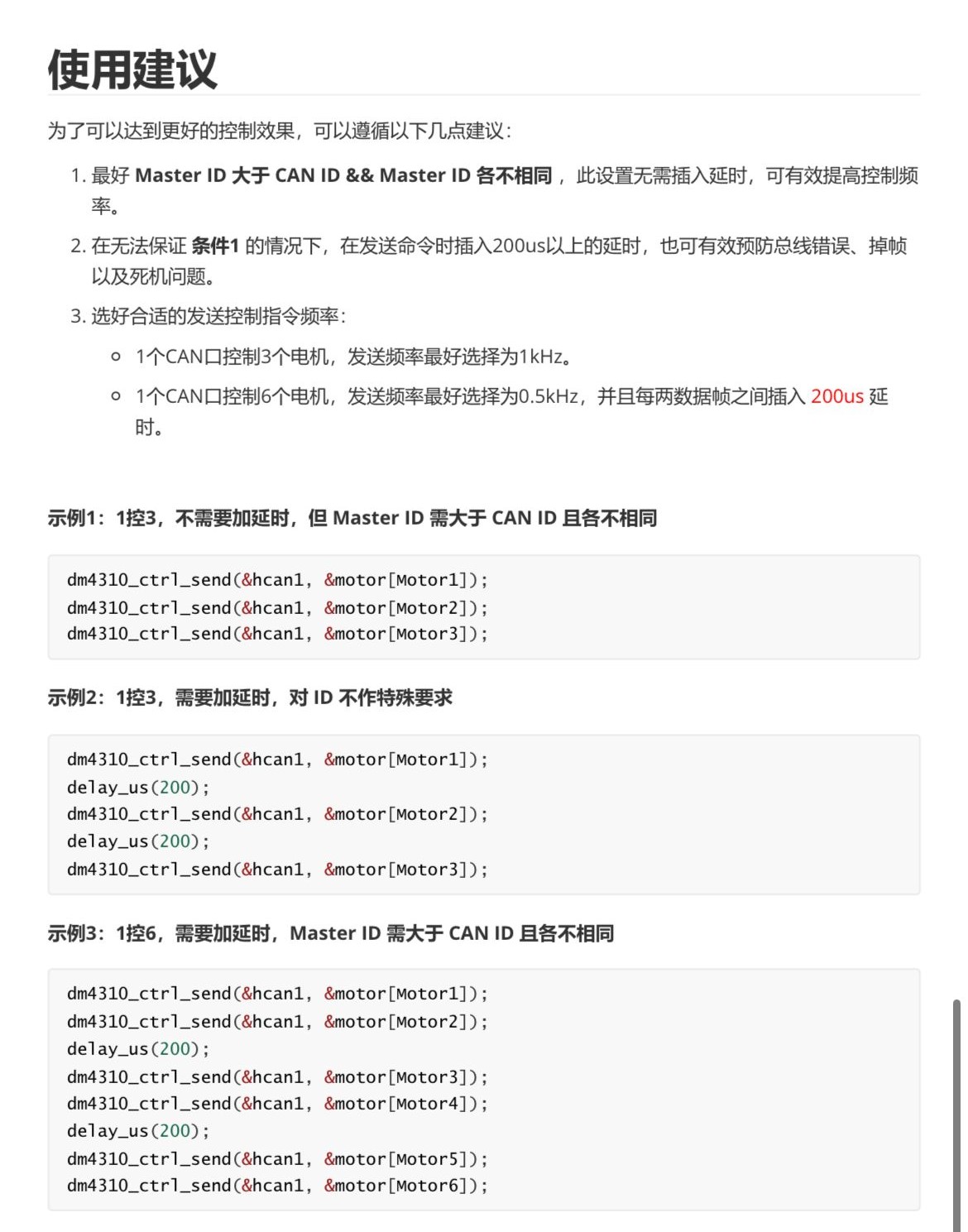
ID设置规范