|
|
||
|---|---|---|
| .Doc | ||
| .assets | ||
| .vscode | ||
| Drivers | ||
| Inc | ||
| Middlewares | ||
| Src | ||
| application | ||
| bsp | ||
| modules | ||
| .gitignore | ||
| .mxproject | ||
| LICENSE | ||
| Makefile | ||
| Makefile.upgrade | ||
| README.md | ||
| STM32F407.svd | ||
| STM32F407IGHx_FLASH.ld | ||
| basic_framework.ioc | ||
| openocd_dap.cfg | ||
| openocd_jlink.cfg | ||
| startup_stm32f407xx.s | ||
| stm32.jflash | ||
| task.ps1 | ||
README.md
YueLu2022/2023 EC basic_framework-dev
可能是最完整最详细最好的电控开源!
[TOC]
本框架设计参考了哈尔滨工业大学(深圳)南工骁🦅战队的EC_framework以及RoboMaster官方的RoboRTS-firmware。
基于basic_framework打造的C++进阶重构版本powerful_framework现已发布!增加全新的消息交互机制和严格的跨任务数据读写保护,采用了现代构建系统CMake+Ninja以追求极致的编译速度,各种针对嵌入式的编译优化全开,DIY程度进一步提升,更有自定义CMSIS-DSP和Eigen等扩展库支持!快来加入试用/和我们一起开发吧😋
功能介绍
架构
总览。
软件栈
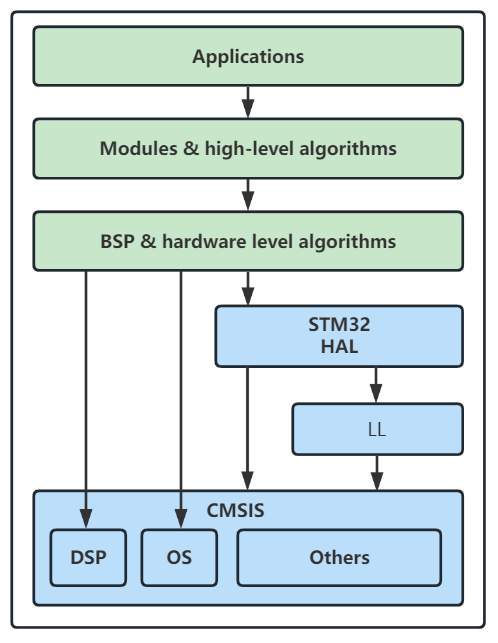
在CubeMX初始化生成的依赖文件基础之上新增了可选的CMSIS-DSP和Segger RTT。
设计思想
框架在结构上分为三层:bsp/module/app。整体使用的设计模式是结构层级模式,即每个“类”包含需要使用的底层“类”,通过组装不同的基础模实现更强大的功能。而最顶层的app之间则通过pub-sub消息机制进行解耦,使得在编写代码时不会出现相互包含的情况。
pub-sub机制的体现:以本仓库的app层为例,包含了chassis,gimbal,shoot,cmd四个应用,每个应用都对应了机器人上的不同模组。cmd应用负责从机器人控制信号来源(遥控器/上位机/环境传感器)处获取信息并解析成各个执行单元的实际动作(电机/舵机/气缸/阀门等的扭矩/速度/位置/角度/开度等),并将此信息发布出去。chassis、gimbal、shoot等包含了执行单元的应用则订阅这些消息,并通过自己包含的子模块,调用它们的接口实现动作。
结构层级模式的体现:以chassis应用为例,chassis中包含了4个底盘电机模块。当chassis收到cmd应用的信息,希望让底盘以1m/s的速度前进。chassis首先根据底盘的类型(舵轮/麦克纳姆轮/全向轮/平衡底盘)以及对应的动力学/运动学解算函数,计算得到每个电机的输目标输入值,此时chassis将输入通过电机模块(motor module)的接口将设定值告知电机。而每个电机模块又有各自的PID计算模块和自身电流&速度&角度传感器的信息,可以计算出最终需要的电流设定值。假设该电机使用CAN协议与电调通信,则电机通过自身包含的CANInstance(bsp_can提供)用于和实际硬件交互,电机模块将设定值电流值或其他指令按照通信协议组织在CAN报文中,通过CANInstance提供的接口,把最终控制数据发送给电调,实现控制闭环。可以看到,包含关系为chassis∈motor∈bspcan。
有了上面的大体认知,我们分别介绍框架的三层结构。
-
bsp即板级支持包,提供对开发板外设的软件抽象,让module层能使用和硬件无关的接口(由bsp提供)进行数据处理与交互。bsp层和ST的HAL为强耦合,与硬件直接绑定。若要向其他的ST芯片移植,基本不需要修改bsp层;若是其他单片机则建议保留接口设计,对接口调用进行重现实现。每一种外设的头文件中都定义了一个XXXInstance(xxx为外设名),其中包含了使用该外设所需要的所有数据,如发送/接收的数据,长度,id(如果有),父指针(指向module实例的指针,用于回调)等。由于C没有
class,因此所有bsp的接口都需要传入一个额外的参数:XXXInstance*,用于实现c++的this指针以区分具体是哪一个实例调用了接口。 -
module即模块层,包括了需要开发板硬件外设支持的(一般用于通信)真实硬件模组如电机、舵机、imu、测距传感器,和通过软件实现的算法如PID、滤波器、状态观测器;还有用于兼容不同控制信息模块(遥控器/ps手柄/图传链路/上位机)的统一接口模块,以及为app层提供数据交互的message center。
module层仍然是基于实例的,一个app会包含多个module的instance。当app便可以用硬件无关的接口使用module,如要求电机以一定速度运动、关闭气阀、给超级电容或上位机发送一些反馈数据等。在有了方便的bsp之后,只需要在你构建的module中包含必须的bsp,然后为app提供合理的接口即可。
-
app是框架层级中最高的部分。目前的框架设计里,会有多个app任务运行在freertos中,当然你也可以根据需要启动一些事件驱动的任务,所有的任务安排都放在
app/robot_task中。当前的app层仅是一个机器人开发的示例,有了封装程度极高的module,你可以在app完成任何事情。目前的app设计里,可以兼容多块开发板的情况,通过条件编译切换开发板的位置。如步兵机器人可以将主控MCU放在云台上,而超级电容控制板同时作为底盘板。使用CAN/SPI/UART将两者连接,便可以通过**
app/robot_def.h**中的宏完成设置。可以根据需要,设置更多的开发板(双云台哨兵、工程机器人)。这套框架可以轻松扩展到所有机器人上,在我们的仓库中,有步兵机器人、平衡步兵机器人、哨兵机器人、英雄机器人、工程机器人以及空中机器人的代码实例,皆按照本框架中的三层结构开发。若设计了新的机器人,只需要在robot_def.h中修改传感器的位置、底盘轮距轴距、拨弹盘容量、弹舱载弹量等参数便可以立刻实现部署。
至于bsp和module中每个instance的设计,我们采用了面向对象的C风格代码,整个框架也统一了变量和函数命名方式,调用层级和数据流十分清晰(下一个章节也有插图阐述)。
为了避免出现”底层代码包含上层头文件“的情况,我们让bsp层instance在注册时要求module提供数据发送/接收的回调函数指针,从而在发生对应中断或事件时完成对module函数的”反向调用“。事实上,你也可以进一步将这套思想放入app的设计中,当某个事件发生时触发app的任务,而不是将app的任务定时运行(这可以提高运行效率,降低cpu占用)。
bsp和module的instance在初始化时接口皆为**XXXInstance* XXXRegister(XXX_Init_Config_s* conf)**,传入该实例所需的config参数,返回一个实例指针(看作this指针),之后要调用模块的功能,传入该指针即可。我们还提供了守护线程,以供module选用,当异常情况发生时在LOG中发送warning、触发蜂鸣器或LED进行声光报警以及错误/离线回调函数,保证系统的鲁棒性和安全性。
执行顺序与数据流
初始化
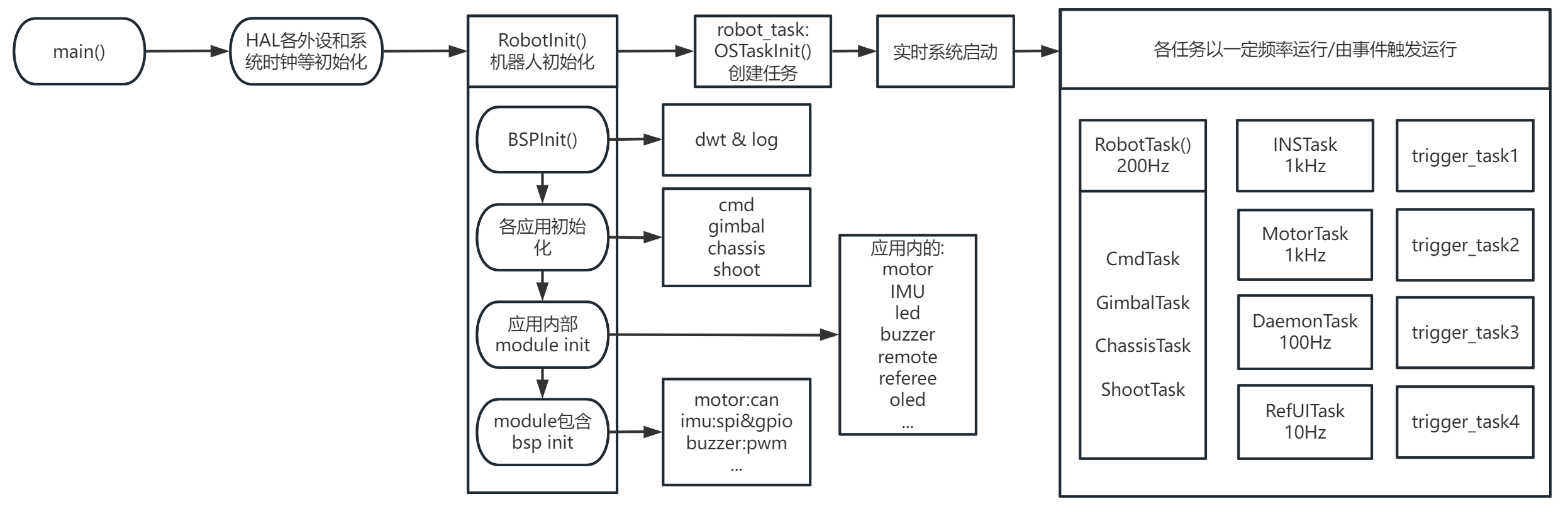
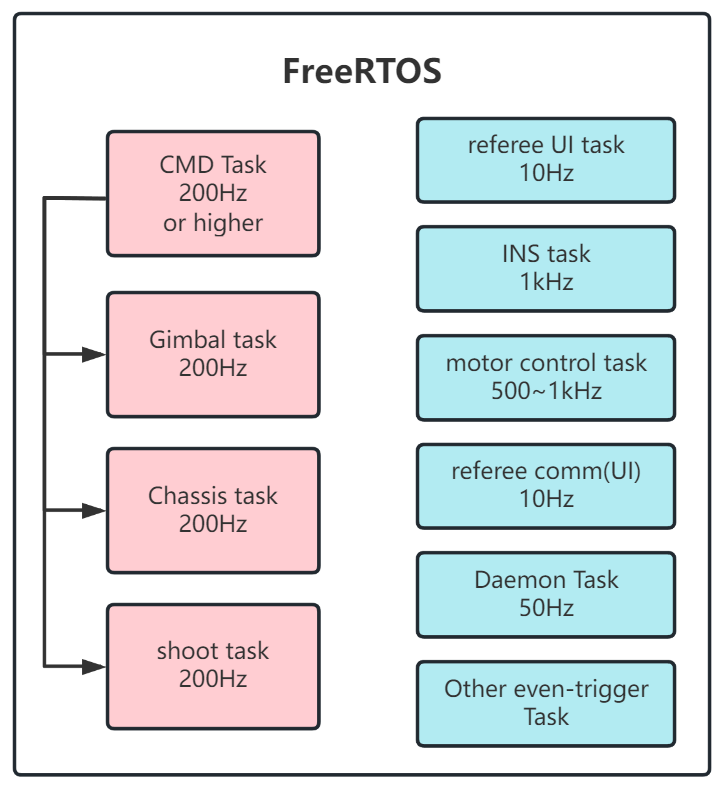
任务结构
app、module和bsp都有相应的rtos任务。其中bsp为创建任务提供了封装工具bsp_tools,旨在将复杂的回调函数转移到任务中而不是在中断内执行,以保证系统响应的实时性和数据完整性。有一些module和app根据功能需要会创建定时任务或事件驱动的任务,这些任务都在初始化时注册,并在特定的时刻被唤醒或周期执行。
数据流

开发工具
介绍完整的工作流。
工具链
强烈推荐使用arm-gnu工具链进行编译(arm-none-eabi-xxx)。
官方下载地址:Arm GNU Toolchain Downloads – Arm Developer
我们更推荐使用Msys2进行库和开发工具管理,关于如何使用Msys2请参考:如何使用本框架
仍然支持使用arm-cc工具链(即keil默认的工具链)进行开发,在cubemx初始化时生成MDK项目即可,然后再手动添加basic_framework的所有头文件和源文件。但非常不建议这样做,arm-cc仅支持单线程编译且编译优化选项远不如arm-gnu多,自定义程度同样不比。
若你一定要这样做,则可以在VSCode中安装keil assistant插件。
IDE?
使用VSCode作为“IDE”。需要的插件支持均已经在VSCode+Ozone使用方法.md中给出。通过VSCode强大的插件系统、language server以及代码补全高亮助力效率倍增。编译则使用集成的task进行,还可以将开发环境终端加入VSCode进一步提升体验。基本的调试如变量&寄存器查看均已在插件中提供支持,launch.json可以进行高自由度的自定义。
Git集成与gitlens/gitgraph/githistory额外插件补充让版本管理和协作从未如此简单,live share把你的伙伴们聚在一起集思广益,一同对抗困难的bug。更多好用的插件、特性和开发技巧请参考"如何使用本框架"章节。
不论如何,请不要使用KEIL作为你的代码编辑器。
调试和性能分析
-
基础的调试可以在VSCode中完成。cortex-debug插件的最新版本已经支持多个gdb-server(jlink/stlink/openocd/pyocd)的live watch(动态变量监视)和变量示波器(可视化)。若不是有特别的需求,请勿使用串口调试器。
-
有高速变量查看和数据记录、多路数据可视化的需求(如进行pid参数整定、查找难以定位的bug)时,使用Segger Ozone。
-
FreeMaster也可以作为调试的备选项。
-
基本的、日常性能分析可以通过
bsp_dwt完成。若要分析关于任务运行和每个函数执行的详细信息和时间,推荐使用Segger Systemviewer。
如何使用本框架
仓库中有各种各样的说明文档和使用帮助。
编译烧录
本项目是基于RoboMaster开发板C型的示例,MCU为STM32F407IG,使用了板载的imu bmi-088,驱动标准的步兵机器人:2自由度GM6020云台、m2006电机拨盘+2*m3508电机摩擦轮的发射机构和MG90舵机弹舱盖,以及带有超级电容控制器的4轮麦克纳姆底盘。
首先在app/robot_def.h中根据注释修改开发板和机器人配置,再在各个app中修改初始化配置(如电机id,上位机通信波特率/使用串口或VCP,imu速率,超级电容id等)。
接着根据VSCode+Ozone使用方法.md配置好编译下载环境之后(再次建议使用Msys2+mingw64/ucrt64/clang64的方式配置环境!),在VSCode中打开项目,点击上方tab页的终端(terminal)->运行构建任务(run build task),便启动编译,若没有问题,最终会在终端中输出如下信息:
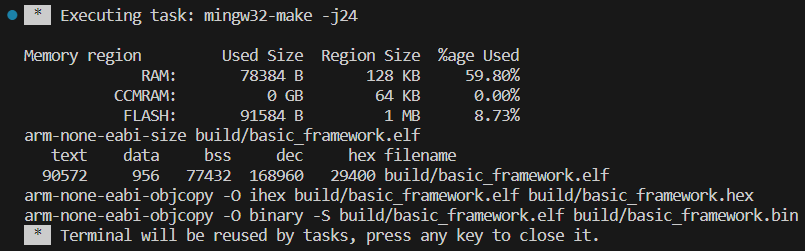
工具链会预测ram,ccram以及flash的使用情况,并报告最终二进制文件的大小和存放位置。
随后,通过调试器将开发板连接至你的电脑,点击上方tab页的终端(terminal)->运行任务(run task),选择download_dap or download_jlink(或你自己编写的stlink/ulink/...),便会开始下载,终端或jFlash中会提示擦除、下载、验证的进度。
想要调试,在左侧tab页选择合适的调试选项,按F5或图形界面的绿色小三角形按钮,开始调试。
更详细的开发流程,请参照.Doc/VSCode+Ozone使用方法.md
基本文档
根目录下的README.md即本说明文档,帮助开发者速览本项目。
.Doc目录下有8个markdown文档,分别为:
- Bug_Report.md :提供了一些提交issues的模板范例,若在使用中出现问题请按照模板提供信息。
- TODO.md :框架后续开发计划和维护说明
- VSCode+Ozone使用方法.md :重要,开发必看。介绍了当前开发工作流和传统KEIL开发的不同,先讲解一些与工具链有关的基础知识,然后说明了如何配置开发环境,安装必要的软件和一些”操作“。还涉及了VSCode编辑调试和Ozone示波器&trace功能的使用指南。
- 合理地进行PID参数整定.md :介绍了如何为PID控制器进行参数整定,包括简单的经验准则和基于模型的前馈控制、扰动消除等方法。
- 如何定位bug.md :当嵌入式开发出现bug时,以更高效地方法进行错误定位和复现。简单的调试器使用技巧。
- 必须做&禁止做.md :字如其名
- 架构介绍与开发准则.md : 重要,必看。若你希望为bsp或module增添新的模块,组装新的app,请参照此文档的编码和命名规范进行。阅读该文档有助于理解并写出和框架代码风格一致的程序。内含该项目的文件树,以框架的工作目录。
- 让VSCode成为更称手的IDE.md :安装好用的插件,对编辑器进行个性化配置,提升开发效率
阅读代码
框架中的三层结构都有详尽的注释帮助阅读和二次开发,三个抽象层都有各自总览的说明文档,而每个bsp/module/app都配有对应的个性化说明文档,提供了接口说明和改进或进一步开发的建议。
建议以自上而下的方式阅读代码,app-》module-》bsp,我们还提供了框架的说明视频,分别讲解每个抽象层和总体的设计思路,还有一些杂碎的开发相关知识:basic_framework教程
VSCode集成工具
我们在.vscode下提供了编写好的一些任务,包括编译,烧录,启动RTT终端(LOG),启动Ozone调试等。有些功能需要配置vscode的插件设置或将一些可执行文件加入环境变量,这些步骤已经在VSCode+Ozone使用方法.md中给出;launch.json里包含了最常见的四种调试任务:使用jlink-server/openocd,启动或附加调试。
for pro-user
Makefile提供了脚本化的Makefile.upgrade,使用后者可以获取更好的开发体验。
可以自行添加需要的编译优化,进行更高级别的定制。
ST官方现在将HAL放入github维护。想要获取最新的支持,可以自行下载,加入本项目编译。
若希望纯开源使用,可以自定义openocd调试和烧录选项,参考根目录的openocd_dap.cfg和openocd_jlink.cfg。
若希望自己编译特定版本的cmsis-dsp或cmsis-os,请前往官方的github仓库下载,将构建规则加入makefile。
我们还增加了CMakeLists.txt以融入更现代化的构建系统,若你希望使用cmake,相信你有能力配置相关的开发环境。可以参考我们的powerful_framework.
如果实时系统任务需要的栈空间不够,请在CubeMX初始化配置中增大任务栈。一些freertos支持的高级功能请自行在配置页开启宏定义后重新生成。
...
后续计划
.Doc/TODO.md中列举了一些可能的功能增强和优化。- 为三个层级都增加入门级培训教程,可以单独运行各个模块以方便上手。
- 优化pub-sub消息机制的性能,同时将app的任务尽可能修改为状态机+事件驱动的回调机制。
- 使用Qt或命令行为机器人配置(主要是robot_def和各个任务中的module初始化配置)编写UI界面,实现无代码机器人部署。
- 为框架编写ROSdriver,通过usb连接到上位机(NUC),合并视觉/算法和电控的工作流。