|
|
||
|---|---|---|
| .assets | ||
| .vscode | ||
| Drivers | ||
| Inc | ||
| Middlewares | ||
| Src | ||
| application | ||
| bsp | ||
| modules | ||
| .gitignore | ||
| .mxproject | ||
| Bug_Report.md | ||
| LICENSE | ||
| Makefile | ||
| README.md | ||
| STM32F407.svd | ||
| STM32F407IGHx_FLASH.ld | ||
| TODO.md | ||
| VSCode+Ozone使用方法.md | ||
| basic_framework.ioc | ||
| openocd_dap.cfg | ||
| openocd_jlink.cfg | ||
| startup_stm32f407xx.s | ||
| stm32.jflash | ||
| task.ps1 | ||
| 如何定位bug.md | ||
| 必须做&禁止做.md | ||
README.md
2023 EC basic-framework
代码参考了哈工深南宫小樱战队的框架设计和RMUA官方开源RoboRTS-firmware框架,在此鸣谢。
每个bsp/module/application都有对应文档,建议阅读之后再看代码&进行开发。框架的搭建思路和讲解视频戳这里:basic_framework讲解。 开发之前必看的文档:README.md & VSCode+Ozone使用方法.md 。开发app层请看application目录下的文档,若要开发module以及bsp务必把上层文档也浏览一遍以熟悉接口定义的方式。 程序的运行流程和框架所有app/module/bsp的数据流图直接拉到本文档底部。
此框架为机器人通用设计,当前的app层是为步兵设计的。不同的机器人只需要重新编写应用层。在我们的战队仓库中有英雄、工程、哨兵、平衡步兵等兵种,可作参考。
此框架在RoboMaster A型开发板的移植也已在组织仓库中提供。
[TOC]
基本信息和开发规范
-
开发方式:
本框架使用stm32cubemx生成,基于makefile编译系统(后期拟修改为cmake+nijna+makefile以提高编译速度,对于目前的版本您可以考虑自行安装ccache以提高编译速度),使用arm gnu工具链开发,利用arm-none-eabi-gcc编译(make命令,命令行为mingw32-make)。
==!deprecated==:若需使用keil5开发,请在stm32cubemx的
project manager标签页下将工具链改为MDK,然后在keil中自行添加所需包含的.c文件和头文件。关于如何在keil下添加dsplib,请参考文档。在vscode中也有KEIL assistant和Embedded IDE插件可供使用。强烈推荐使用VSCode进行开发,Ozone进行调试。
VSCode可通过Cortex-Debug利用OpenOCD进行调试,jlink/stlink/dap-link都支持,具体的使用方法和环境配置教程在VSCode+Ozone使用方法中。请使用UTF-8编码查看&编辑此项目。 此外,本项目中使用到的物理变量值均采用标准单位制,若有特殊需求,可以通过module层的
general_def.h添加物理量转换关系的宏。 -
分层:
本框架主要代码分为BSP、Module、APP三层。三层的代码分别存放在同名的三个文件夹中,这三个文件夹存放在根目录下。开发过程中主要编写APP层代码,Module层与BSP层不建议修改。如需添加module(如oled屏幕、其他传感器和外设等),请按照规范编写并联系组长提交commit到dev分支或对应的功能名分支,完善后合并至主分支。在配置git的时候,将自己的
user.name配置成英文缩写或易懂的nick name。BSP层构建于ST的HAL(硬件抽象层)之上,针对RoboMaster竞赛所用电控外设和模块的特点对其进行了进一步封装;Module层是基于bsp的封装打造的各种模块,旨在为app层提供硬件无关的接口,即应用层不应该出线任何与片上外设相关的代码。
main.c的位置在
Src/main.c -
代码格式:
在vscode-设置-扩展-C/C++-C_Cpp:style下修改。默认为
Visual Studio。编写完新的代码后,使用右键-格式化文档(注:请勿对cube生成的文件使用此操作)。此操作不会改变文档的内容,但会改变缩进、空行、符号位置等,使代码更加统一、整洁。在cubemx生成的文件(尤其是main.c和freertos.c)时,务必按照cubemx的提示将用户代码放在usercode注释代码块内,否则重新生成时会被覆盖.
请保持良好的注释编写习惯,建议安装doxygen插件。务必统一在.h文件中为外部接口编写注释,并给类型定义编写必要的注释。对于私有函数(.c文件中static修饰),请在.c文件中进行注释。对于复杂的代码段,也请添加注释。
每个功能模块编写完之后,及时添加说明文档。内容参照已有的文档,要进行简短的总体说明、代码结构、外部接口和类型定义、私有函数和变量,以及使用的说明和范例。如果有特别需要注意的地方,也请说明。
==在编写代码的时候,注意添加安全检查,“treat your users as idiots!”==
-
面向对象设计:
C语言不存在“成员函数”的概念。为实现类似效果,所有按照这一思想构建的函数都会有一个传入参数,将结构体(对象)传入。
-
代码风格:
函数统一使用动宾短语,建议不超过4个单词。每个单词首字母大写:
void SetMotorControl()变量命名使用下划线命名法,统一小写。尽量不要使用缩写,并注意让变量名本身能够表达其含义:
uint8_t gimbal_recv_cmd;后续可能将指针类型的变量名都加上
ptr_或p前缀。私有变量加上下划线_前缀。在利用
typedef定义新的类型时,使用单词首字母大写+下划线隔开+定义后缀的方式:typedef struct { float Accel[3]; float Gyro[3]; } IMU_Data_t; typedef struct { can_instance_config_s can_config; uint8_t send_data_len; uint8_t recv_data_len; } CANComm_Init_Config_s; typedef struct { float *other_angle_feedback_ptr; float *other_speed_feedback_ptr; PID_t current_PID; PID_t speed_PID; PID_t angle_PID; float pid_ref; // 将会作为每个环的输入和输出顺次通过串级闭环 } Motor_Controller_s;数据类型单一、结构不复杂的类型以
_t后缀结尾(表明这是一种数据,type);复杂的结构体类型使用_s结尾,表明其功能和内涵多(structure)。对于某个bsp、module,其类型结构体应该称为xxxInstance:typedef struct _ { CAN_HandleTypeDef *can_handle; // can句柄 CAN_TxHeaderTypeDef txconf; // CAN报文发送配置 uint32_t tx_id; // 发送id uint32_t tx_mailbox; // CAN消息填入的邮箱号 uint8_t tx_buff[8]; // 发送缓存,最大为8 uint8_t rx_buff[8]; // 接收缓存 uint32_t rx_id; // 接收id uint8_t rx_len; // 接收长度,可能为0-8 // 接收的回调函数,用于解析接收到的数据 void (*can_module_callback)(struct _ *); // callback needs an instance to tell among registered ones } CANInstance;
BSP层(Board Sopport Package)
- 主要功能:实现对STM HAL的封装功能,进一步抽象硬件。
- 在本框架中,BSP层与cubeMX初始化有一定程度的耦合,若没有在CUBEMX中开启某个外设,则在application不能初始化使用了对应外设的module。对该层的修改可能需要使用cube重新生成工程(主要是外设的配置,通信速度,时钟频率和分频数等)。该层也是唯一允许直接出现stm32HAL库函数的代码层,在非BSP层编写代码时,如需使用HAL_...函数,请思考是否有同功能的BSP_...函数。不过,由于ST的HAL已经对硬件进行较高的抽象(如以handle_xxx的方式描述一个硬件外设或功能引脚),因此即使需要更换开发板,必须修改的内容也极少。
- 最简单的(如gpio)仅是对HAL库函数的封装。较为复杂的则会进行一定程度的处理(如can)
编写和使用指南
- 补充与修改:某款主控对应的BSP层应保持相同,当认为该层可能缺少部分功能或有错误时,请联系组长确认后解决并更新整个框架,请勿自行修改提交。 请在你修改/增加的bsp_XXX.md中提供测试用例和使用示范以及任何其他需要注意的事项,并在代码必要的地方添加注释。
- 代码移植:BSP层也是在不同系列、型号的stm32间执行代码移植时主要需要关注的代码层。向功能更强系列移植一般只需要重配cube,而向功能较少的系列移植还需要去掉其不支持的功能。如果仅是对同一型号的开发板进行CUBEMX初始化配置的修改,一般只需要给app层的应用重新分配外设和引脚,或修改波特率和通信频率等。
- 子文件与文件夹:
- bsp.c/h:该层用于bsp基础功能初始化的文件,其中
bsp.h被include至main.c中,以实现必须的底层初始化,目前需要初始化的bsp只有log和dwt,不同主频的MCU需要修改dwt初始化的参数。注意,有些外设如串口和CAN不需要在bsp.c中进行模块层的初始化,他们会在module层生成实例(即C语言中的结构体)并注册到bsp层时自动进行初始化。以此达到提高运行速度避免未使用的模块被加载的问题。 - bsp_xxx.c/h:每一个成对的.c/h对应一种外设,当上面两个代码层需要使用某个外设时,这里的文件就是对应的交互接口。
- bsp.c/h:该层用于bsp基础功能初始化的文件,其中
- 注册回调函数与接收:通信类外设模块有的定义了回调函数(函数指针类型),module层的模块需要自行处理接收回调函数,在注册bsp的时候应传入对应参数格式的回调函数指针,使得接收中断发生的时候bsp层可以自行找到对应的上层回调函数进行调用。这也是回调函数设计的初衷:为底层代码调用上层代码提供接口,当特定事件发生的时候完成触发(自行搜索hook函数)。
Module层
-
主要功能:实现对设备的封装,如将IMU、PC、电机等视为一个完整的功能模块,让应用层(app)不需要关心其底层的具体实现,直接使用接口。
-
文件夹
-
注意,module层没有也不需要进行统一初始化。app层的应用会包含一些模块,因此由app来调用各个模块的init()或register()函数,只有当一个module被app实例化,这个模块才会存在。
命名为init()的初始化一般来说是开发板的独占资源,即有且只有一个这样的模块,无法拥有多个实例,如板载陀螺仪、LED、按键等。命名为register()的模块则可以拥有多个,比如电机。legacy support,为了保证代码风格统一,所有接口统一命名为xxxRegister()。 -
algorithm:该层软件库存放位置,这些功能与硬件无关,而是提供通用的数据结构和“算子”以供该层的其他部分调用,主要是算法、控制器、底盘和位姿解算等。
-
-
module编写和使用指南:
-
初始化:
根据代码对应的函数说明,传入对应的配置文件。对于某些需要集中设置的参数,一般于模块的头文件中会额外设定一个xxx_config_s的结构体用于初始化的参数传递。如果不需要进行这样的集中设置,则是直接传入对应的参数或module结构体中本就存在的成员变量。
-
结构体:
也就是所说的“实例”,定义一个module结构体,对于app层来说就是拥有某一个功能模块的实例,比如一个特定的电机。在对电机进行操作的时候,为实现面向对象的功能,需要在接口函数中传入该结构体指针。
-
函数:
.c中存放的static函数和static变量相当于这个类的private函数,.h中的则相当于public。相似的driver的public函数应较为统一。由于通信格式,使用方法等的不同,不同通信设备在读取操作、数据格式上可能有所不同,这些不同应该在driver的内部处理。由于C语言没有对象的概念,对于通信类的module,不同的实例需要在module.c中保存一份指针,用于处理数据接收的解析。
-
封装程度:
app层使用时与底层实现无关。如在使用电机时,这个电机的数据该和哪些电机的数据在一个数据包中发送,can的过滤器设置,均属于应该自动处理的功能;通信类的模块应该封装到只有初始化、发送和读取。对于电机,则是用于初始化的
register和发送控制命令set_control两个函数和一个实时更新的用于给app层提供该信息的数据结构体(电机反馈信息)。
-
Module层主要存放的是类型定义和实例指针数组,在该层没有进行实例化(定义或通过malloc分配空间),若在APP层没有实例化,则该模块的存在与否不会影响编译后的可执行文件,只会占用.c文件中的static变量和代码区的少量内存(有些module只会保存每个实例对象的指针,在没有初始化的时候仅仅占用一个指针数组的空间)。因此,基于本框架的其他工程没有必要删除APP层未使用的module文件。
务必为模块添加说明文档和使用范例,以及其他需要注意的事项(如果有)。
面向对象小指南:
由于C语言没有对象的概念,对于需要使用通信的module,在其.c文件下都需要保存每个实例的指针,在收到消息时(发生回调)遍历所有实例指针,找到收到消息的实例。这种处理方式可能会导致实时性下降,例如CAN接收时要遍历所有注册了CAN的实例,进入module层还需要一次遍历。用C++则可以将对象的this指针和模块的回调函数进行绑定,生成一个可调用对象然后再进行CAN的注册,使得其不需要module层的遍历。
考虑在实例中加入一个额外的
void*域成员(成员变量),其内容为module层实例的地址。这样CAN收到消息时只需要遍历所有CAN instance,对于相同的模块,可以在其回调函数内部获取CAN instance的void*指针并通过强制类型转换cast成模块的实例结构体指针类型,从而访问特定的模块。 这实际上是保存“对象”的parent pointer,使得实例可以访问拥有自己的实例(访问自己的父亲)。和回调函数配合,就可以防止交叉包含并为底层访问上层内容提供支持。
APP层(application)
- 功能:实现机器人的控制,对机器人控制结构进行抽象。
在完成BSP层和Module层后,如果在APP层没有控制代码,则代码并无实际功能。换言之,BSP层与Module层的存在是为了APP层更简单、更合理、更易于扩展和移植。本框架的初始目标即是实现:在APP层仅需思考逻辑并用无关硬件的C语言代码实现即可完成整个机器人的控制。所有需要使用的模块和算法都在Module层提供,开发板外设硬件的抽象在bsp层完成。所有使用到的模块都在APP层初始化,因此不需要module自行初始化。
-
APP层按照机械设计结构(如云台、发射、底盘、夹爪、抬升、机械臂)建立对应的子文件夹,在其中完成初始化和相关逻辑功能的编写。还有用于发布指令的云台指令应用和底盘指令应用,前者应该包含一个遥控器模块和一个视觉通信模块,后者包含裁判系统模块。它们包含的模块都会处理一些指令和控制信息,这样还可以方便兼容双板。
-
单双板切换在application的
robot_def.h中进行,修改宏定义可以切换开发板的设定模式。当设定为单板的时候,在robot.c中会对gimbal,chassis,shoot,robot_cmd四个应用都进行初始化。对于双板的情况,需要将上板配置为gimbal board,下板配置为chassis board,它们会分别初始化gimbal/shoot/robot_cmd和chassis -
对于单板的情况,所有应用之间的信息交互通过message center完成。而使用双板时,需要通过板间通信传递控制信息(默认遥控器接收机和pc在云台板,裁判系统在底盘板,因此需要互发信息)。当前通过条件编译来控制信息的去向(发往message center/接收,还是通过can comm发送/接收),后续考虑将双板通信纳入message center的实现中,根据
robot_def.h的开发板定义自动处理通信,降低应用层级的逻辑复杂度。
文件树
板级支持包的每个组件,每个moduel,以及每个app都有对应的说明文档.
ROOT:.
│ .gitignore # git版本管理忽略文件
│ .mxproject # CubeMX项目文件
│ basic_framework.ioc # CubeMX初始化配置文件
| debug_ozone.jdebug # ozone debug调试配置和缓存文件
│ LICENSE # 开源协议文件
│ Makefile # 编译管理文件,为make(mingw32-make)命令的目标
│ openocd_dap.cfg # 用于OpenOCD调试使用的配置文件,dap用
│ openocd_jlink.cfg # 用于OpenOCD调试使用的配置文件,jlink用
│ README.md # 本说明文档
│ startup_stm32f407xx.s # F407汇编启动文件
│ stm32.jflash # jlink的烧录的配置文件,一键下载用
│ STM32F407.svd # F407外设地址映射文件,用于调试
│ STM32F407IGHx_FLASH.ld # F407IGH(C板MCU)目标FLASH地址和链接规则,用于编译(作为链接阶段的链接器)
| task.ps1 # powershell脚本,一键编译并进入ozone调试/reset开发板用
│ TODO.md # 项目待完成的任务
│ VSCode+Ozone使用方法.md # 开发环境配置和前置知识介绍
│ 修改HAL配置时文件目录的更改.md # 重新配置CubeMX时的步骤和注意事项
│ 必须做&禁止做.md # 开发必看,规范和要求
| 如何定位bug.md # 开发必看,快速定位bug并进行修复.还提供了一些debug典例
|
├─.vscode
│ launch.json # 调试的配置文件
│ settings.json # 工作区配置文件,根据自己的需要配置
│ tasks.json # 任务配置文件,包括一键编译下载调试等
│
├─.assets # 说明文档的图片
├─application # 应用层
├─bsp # 板级支持包
├─modules # 模块层
|
├─Src #hal生成的外设初始化源文件
├─Inc #hal生成的外设初始化头文件
├─Drivers #hal driver和cmsis drivers
└─Middlewares # STusb ext , rtos , segger rtt等
BSP/Module/Application介绍
在对应应用、模块和板级支持包文件夹下。每个.c文件或完整的功能模块都有说明文档。在编写新代码时注意按照规范编写说明文档。
整体架构
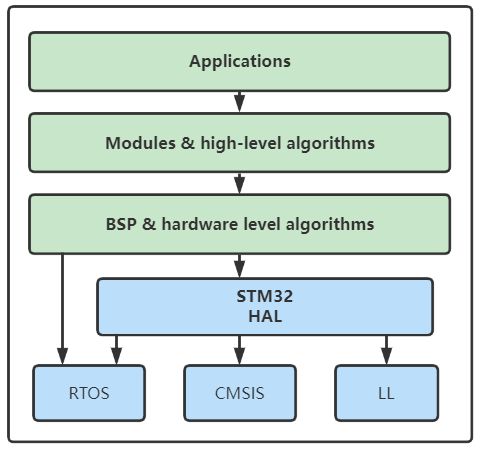
软件分层
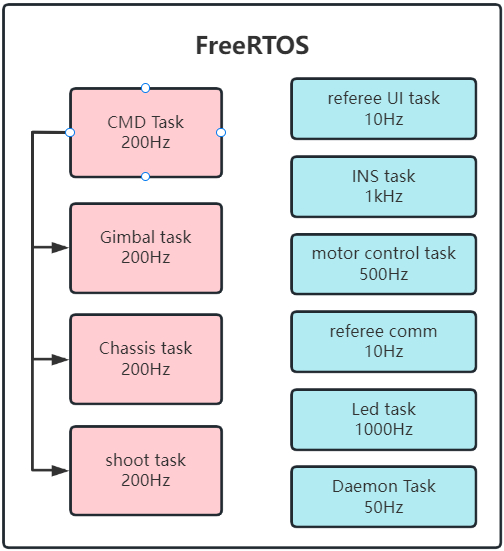
运行任务
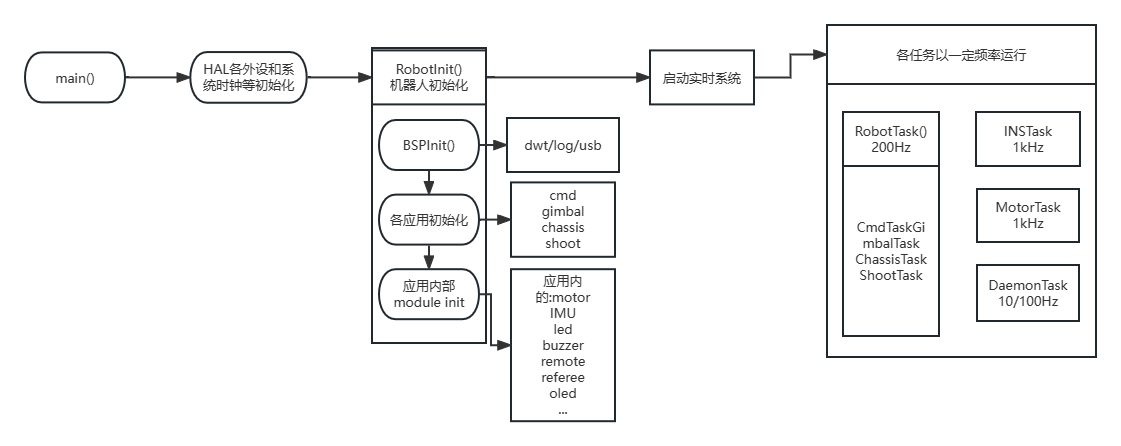
初始化流程
graph TD
HAL库初始化 --> BSP初始化 --> Application初始化 --> app调用其拥有模块的初始化 --> 启动操作系统
注意,应用初始化不得放入其对应任务中,即使是在死循环前,否则可能导致一些需要定时器的任务初始化异常。
APP会调用其所有的模块的初始化函数(注册函数),这是因为本框架的设计思想是任何模块在被注册(构造/初始化)之前,都是不存在的,当且仅当定义了一个模块结构体(也称实例)的时候,才有一个实体的概念。
main函数唯一需要的函数是app层的robot.c中的RobotInit()函数,它首先会调用BSP初始化,然后进行所有应用的初始化;每个应用会调用对应模块的初始化;一些依赖通信外设的模块会将通信支持相关的bsp进行初始化。初始化结束之后实时系统启动。
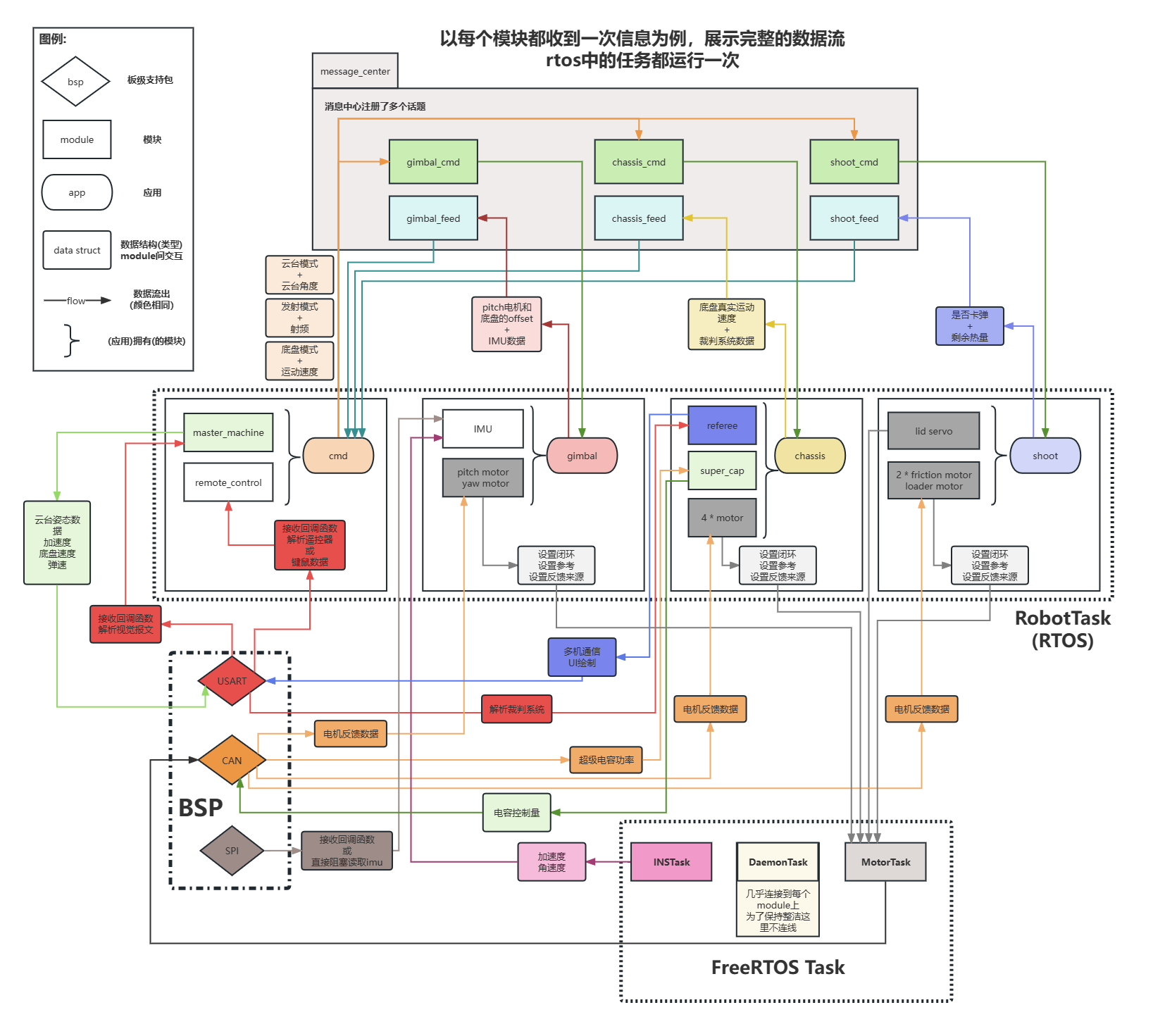
程序运行流程
程序数据流